 《电机驱动与调速》第54讲(交流位置随动系统)
《电机驱动与调速》第54讲(交流位置随动系统)
《《电机驱动与调速》第54讲(交流位置随动系统)》由会员分享,可在线阅读,更多相关《《电机驱动与调速》第54讲(交流位置随动系统)(12页珍藏版)》请在七七文库上搜索。
1、1 第第 5454 讲讲 项目项目7 7 典型调速系统典型调速系统 任务任务19 19 典型交流调速系统典型交流调速系统 情景情景5 5 小功率交流位置随动系统小功率交流位置随动系统 教学目标教学目标 1 1、熟悉位置随动系统的组成、熟悉位置随动系统的组成 2 2、掌握位置随动系统的部件及原理、掌握位置随动系统的部件及原理 教学重点教学重点 位置随动系统的组成位置随动系统的组成 教学难点教学难点 位置随动系统的部件及原理位置随动系统的部件及原理 教学方法教学方法 探究式、演示、情境交融、启发互动式教学法探究式、演示、情境交融、启发互动式教学法 教学手段教学手段 多媒体教学、动画演示教学多媒体教
2、学、动画演示教学 作业布置作业布置 作业题作业题7 7-8 8 2 教学过程:教学过程:项目项目7 7 典型调速系统典型调速系统 任务任务19 19 典型交流调速系统典型交流调速系统 情景情景5 5 小功率交流位置随动系统小功率交流位置随动系统 1 1、位置随动系统的组成、位置随动系统的组成 执行元件输出功率在执行元件输出功率在50W50W以下的随动系统称为小功率随动系统,以下的随动系统称为小功率随动系统,大功率随动系统执行元件输出功率在大功率随动系统执行元件输出功率在500W500W以上。以上。位置随动系统是伺服系统其中之一。位置随动系统是伺服系统其中之一。位置随动系统是控制被控对象的输出自
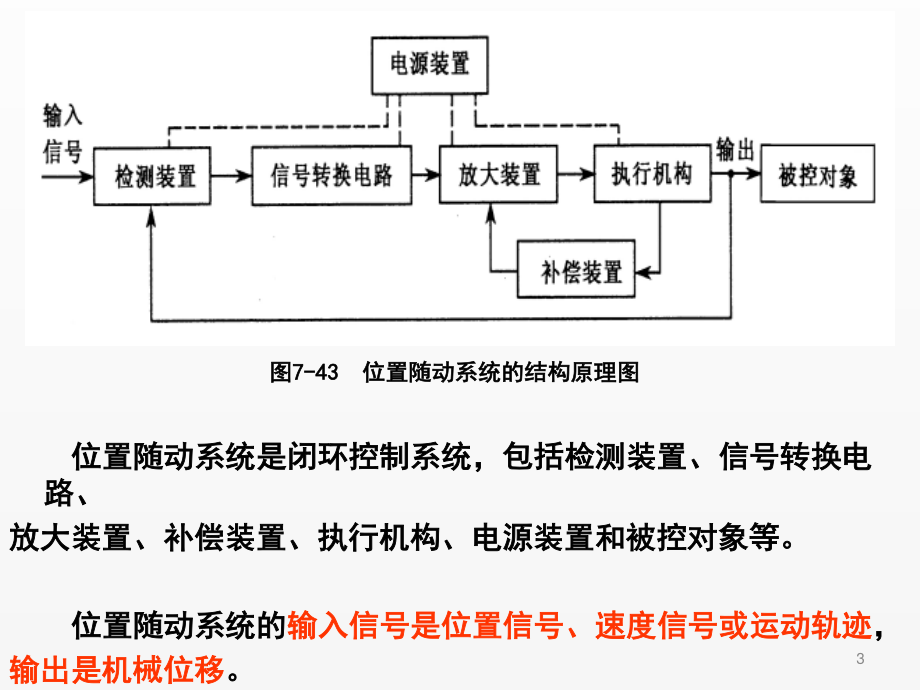
3、动连续精确跟踪输入信位置随动系统是控制被控对象的输出自动连续精确跟踪输入信 号的变化,实现要求机械位移。号的变化,实现要求机械位移。(1 1)组成)组成 位置随动系统的结构原理如图位置随动系统的结构原理如图7 7-4343所示。所示。3 图图7 7-43 43 位置随动系统的结构原理图位置随动系统的结构原理图 位置随动系统是闭环控制系统,包括检测装置、信号转换电位置随动系统是闭环控制系统,包括检测装置、信号转换电路、路、放大装置、补偿装置、执行机构、电源装置和被控对象等。放大装置、补偿装置、执行机构、电源装置和被控对象等。位置随动系统的位置随动系统的输入信号是位置信号、速度信号或运动轨迹输入信
4、号是位置信号、速度信号或运动轨迹,输出是机械位移输出是机械位移。4 如图如图7 7-4444所示是一个电位器式的小功率位置随动伺服系统,所示是一个电位器式的小功率位置随动伺服系统,它它 由以下五个部分组成。由以下五个部分组成。图图7 7-44 44 电位器式位置随动系统电位器式位置随动系统 (2 2)对照)对照 调速系统强调抗扰性调速系统强调抗扰性,位置随动系统强调快速跟随性位置随动系统强调快速跟随性。5 2 2、位置随动系统的部件及原理、位置随动系统的部件及原理 位置伺服系统包括被控对象、执行元件、放大元件、检测元位置伺服系统包括被控对象、执行元件、放大元件、检测元件、给定元件、反馈环节、比
5、较环节等。件、给定元件、反馈环节、比较环节等。(1 1)位置检测元件)位置检测元件 1 1)伺服电位器()伺服电位器(RPRP)如图如图7 7-4545所示为伺服电位器示意图,其中所示为伺服电位器示意图,其中R RPsPs为给定电位器,为给定电位器,R RPdPd 为检测电位器。为检测电位器。其伺服电位器的输出电压(即偏差电压)其伺服电位器的输出电压(即偏差电压)U=KU=K(iioo)=K=K。式中式中为两电位器轴的角位移之差。为两电位器轴的角位移之差。6 图图7 7-45 45 伺服电位器伺服电位器 图图7 7-46 46 自整角机发接接线图自整角机发接接线图 7 2 2)自整角机()自整
6、角机(CTCT)自整角机从结构上分为接触式和无接触式两类。自整角机从结构上分为接触式和无接触式两类。这里介绍接触式的结构和工作原理。这里介绍接触式的结构和工作原理。结构组成结构组成 自整角机的定子和转子铁芯均为硅钢冲片压叠而成。自整角机的定子和转子铁芯均为硅钢冲片压叠而成。定子绕组与交流电动机三相绕组相似,也是彼此在空间上相定子绕组与交流电动机三相绕组相似,也是彼此在空间上相隔隔 120120 U U、V V、W W三相分布绕组,常联接成三相分布绕组,常联接成Y Y形,定子绕组称为整步绕形,定子绕组称为整步绕组。组。转子绕组为单相两极绕组(通常做成转子绕组为单相两极绕组(通常做成隐极式隐极式,
7、图中为直观起,图中为直观起见见 常画成磁极式)。转子绕组称为励磁绕组,它通过两只滑环一电常画成磁极式)。转子绕组称为励磁绕组,它通过两只滑环一电刷刷 与外电路相连而通入交流励磁电流。与外电路相连而通入交流励磁电流。8 接线接线 控制式自整角机是作为转角电压变换器用的。使用时,总是控制式自整角机是作为转角电压变换器用的。使用时,总是用用 一对相同的自整角机来检测指令轴(输入量)与执行轴(输出量)一对相同的自整角机来检测指令轴(输入量)与执行轴(输出量)之间的角差。与指令轴相联的自整角机称为之间的角差。与指令轴相联的自整角机称为发送器发送器,与执行轴相,与执行轴相联联 的则称为的则称为接收器接收器
8、。在实际使用时,通常将发送器定子绕组的三个。在实际使用时,通常将发送器定子绕组的三个出出 线端线端U1U1、V1V1、W1W1与接收器定子绕组的三个对应的出线端与接收器定子绕组的三个对应的出线端U2U2、V2 V2、W2W2相联,如图相联,如图7 7-4646所示。所示。工作原理工作原理 发送器的转子绕组所加正弦交流励磁电压发送器的转子绕组所加正弦交流励磁电压U Uf f(t)=Ufmsin(t)=Ufmsin o ot t,式中式中 o o称为调制角频率,与称为调制角频率,与 o o对应的频率对应的频率f fo o称为调制频率。称为调制频率。f fo o通常通常 为为400Hz400Hz或或


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 电机驱动与调速 电机 驱动 调速 54 交流 位置 系统
 七七文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
七七文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。

 浙公网安备33030202001339号
浙公网安备33030202001339号
链接地址:https://www.77wenku.com/p-250813.html